Демонстрация самохода мотор-генерирующей системы с инерционным маховиком (ротором).
[LIVE] Overunity Proof - Free Energy Generator Project
Проект Генератора Свободной Энергии
Доказательство генератора OverUnity (Часть 1)
ПЛАН А, проверка перегрузки по току на циркуляционном электричестве, как долго продлится напряжение
Хороший пример использование массивного инерционного ротора в системе мотор генератор. Автор демонстрирует вращение ротора затраты на подкрутку-вращение и съем для подзаряда батареи и нагрузку в виде лампочек. Длительное время напряжение в цепи с "мотором", "генератором", АКБ и нагрузкой держится в мерности 12,3 В. При этом ротор вращается с устойчивым угловым моментом вращения (затраты на вращение), Горение лампочек нагрузки (затраты нагрузки). В данном случае АКБ является буферным источником напряжения в данной цепи.
Начинаем изучение конструкции:
Состоит из Ротора-Маховика. На кромку обода приклеены магниты. По сути это ротор привода для мотора с большим моментом инерции, примерно 500-600 мм в диаметре (если исходить из визуальной оценки размеров стартового аккумулятора 12В).
Если смотреть в левый угол картинки находится две катушки возможно на одном сердечнике, которые имеют модуль управления через датчик холла. Первая предположительная схема, вторая альтернативная, обе широко распространены.
У автора определенно стоит первая схема, на фото видно два силовых SMD транзистора и прикрепленный датчик холла сверху катушек. Количество проводов для коммутации такой схемы совпадают.
Генераторный блок имеет вид как срезанный трансформатор, где с сердечником удалили первичную обмотку, а вторичную со средней точкой оставили. Схема может иметь такой вид:
Таким образом АКБ находится в цепи моторного узла, где установлен вольтметр, и имеем обособленную схему в которой через ток понижающий резистор (керамика) подключены светодиодные лампы нагрузки.
Мощность нагрузки можете оценить самостоятельно. Из снимков видно что при пуске и пере подключении системы напряжение вторичной цепи с подключенной нагрузкой больше чем напряжение заряда АКБ,
А весь период после разгона и подключении выходного контура, напряжение в системе так и осталось на отметке 12,3 вольта.
На снимке зафиксирован период в 37 минут, который продемонстрирован работы системы с отдачей мощности нагрузке. Если бы автор установил амперметры в провод от выпрямительного блока с конденсаторами к АКБ, и в провод к мотору, а также в нагрузку с вольтметром, демонстрация была бы абсолютной. Но имеем что имеем.
Резюме: к сожалению констатировать факт, абсолютного самохода мы не можем, так как нет полной вольт- амперной характеристики в цепях системы.
Лично мое мнение, что узел Ротор-Маховик с магнитами и разгонный электромагнитный узел с управлением через силовой ПУШ-ПУЛ драйвер с двухрежимным датчиком холла не требует изменения для эксперимента. Единственное я бы переделал крепление на ось колеса маховика и подверг более точной балансировке (хотя небольшой дисбаланс как раз и имеет такой эффект, по причине работы ЦБС).
Генераторный узел требует изменения. Я не буду излагать постулаты, но основное это минимальное омическое сопротивление (нет в съемном блоке), Максимальная магнитная индукция используемая для обработки активного провода провода фазы, т.е. соотношение активного провода к неактивному должно быть в большую сторону или равно. У автора Индукция только во внутренней части магнитно проводящей подковы. Магнитная индукция рассеивается в подкове и только частично работает с активным проводником. Таким образом эффективность магнитной индукции от магнитов для создания ЭДС в проводе фазы можно считать 10-15%. Вот скорость изменения потока в данном варианте на высоте.
Формула дляЭДС: Е(U) = B(T) * l (m) * v (m/s)
Формула для тока замкнутой цепи, в которой есть АКБ:I(A) = (E - Ubat) / (R+...+r)
где: (E - Ubat) - это разница напряжения ЭДС фазы и Напряжение АКБ
(R+...+r) - сумма Омических сопротивлений элементов контура
Для данной конструкции оптимальным вариантом будет система генератора "РОЛИКИ" по мотивам генератора Грамме, или использование кольцевого сердечника. Если электромагнитный момент традиционного генератора с сердечником складывается от электромагнитной блокировки магнитнопроводящего контура, а в аксиальных машинах без сердечника от силы ампера от тока в проводе и электромагнитной силы катушек, но в генераторах на кольцевых сердечниках при выбранной конфигурации остается только сила Ампера, так как электромагнитные силы статора и магнитов ротора имеют не противостояние на замыкание в контур, а расположены перпендикулярно друг другу. Пример расчета электромагнитных сил и момента силы на валу генератора для однофазного аксиального традиционного генератора:
Как видно из расчета из общего момента силы генератора 21,4 Н *м, доля формирующего его от силы ампера составляет 2,8 Н*м (13%). Конструктивно в системе РОЛИКИ Момент силы от действия силы ампера увеличивается, но общий Электромагнитный момент генератора уменьшается при равнозначной выходной и полезной мощности генератора:
Если учесть, что моторный электромагнит и П-образный сердечник находится на одном удалении от оси, рычаг исключен в априори момент передачи 1:1. Остается только параметры инерции и момента силы ротора-маховика. Приблизительно его вес 35 кг. толщина и ширина обода по 5 см (50 мм). Проверим его момент инерции
Определим его угловую скорость для показателя полной заряженности и на какой угловой скорости этот маховик становится интересен.
Таким образом маховик с параметрами: Общий вес - 35 кг, Диаметр внешний - 0,5 метра; ширина обода - 50 мм; толщина обода - 50 мм, имеет точку равновесия (заряженности) на скорости вращения 1724-1725 об/мин и имеет накопленную кинетическую мощность 35,7 кВт. При этом механический момент силы на валу соответствует 198 Н*м.
При разгоне до угловой скорости до 1900-2000 об/мин возможна постройка ротоверторной схемы с генератором на валу маховика до 3 кВт при требуемом моменте силы на вал маховика 4,9 Н*м. (ссылка на материал где имеется калькулятор расчета и все описания и методики по генераторам имеющим гораздо меньший электромагнитный момент по сравнению с традиционными электрогенераторами)
В демонстрируемой установке угловая скорость гораздо меньшая примерно 400 - 500 об/мин
Но даже при явной работе в "не дозаряженном" состоянии, маховик имеет момент силы на валу 57-68 Н*м и Накопленную кинетическую энергию 3-4 кВт
Это свидетельствует только о том что причина стабильной работы системы момент силы и накопленная кинетическая энергия в инерционном роторе установки. Т.е. нарушен якобы постулат физики, что энергия накопленная в маховике должна обязательно тратится адекватно включенной нагрузке. А по факту этого не происходит.
Возможно и тратится но очень медленно. что интервал времени в 30 минут не позволяет оценить данный механизм. В любом случае демонстрация как раз из области когда применённый массивный конденсатор-маховик позволял выполнить конструкции с демонстрации СОР более единицы еще во второй половине 20 века.
Ну и еще один весьма интересный видеоролик
Принцип тот - же создание из махового колеса инерционного ротора с колоссальным моментом инерции. Нужен хороший генератор и вполне реально моторчик заменить электромагнитным элементом на ПУШ-ПУЛе.
И в завершение интересная информация, чистая математика. Всем известная формула расчета Момента силы (Мj) Н*м как произведения момента инерции (J) кг*м² на угловую скорость вращения (w) рад/с. Мj = J*w
Заходим на сайт с техническими характеристиками электродвигателей, где указаны их основные характеристики в т.ч. и Момент инерции ротора:
Остается только вывести несколько деталей: угловую скорость в радианах, момент силы от момента инерции и соотношение основного момента силы мотора к моменту силы от момента инерции.
Продолжение истории:
Как видим автор устройства идет логически, уже приделал однофазный синхронный генератор на вал ротора-маховика.
Нам нужно определится с возможностью данного генератора. Мы видим максимальную ЭДС фазы генератора после выпрямления. Также определимся с сопротивлением жилы фазы (ориентировочно, автор не выкладывает точных данных).
Имеем Мерность ЭДС (Е=) 16,6 В и сопротивление фазы (R=) 0,531 Ома
Далее мы имеем напряжение АКБ (Ubat = 12,3В), сопротивление АКБ примем в значении (r = 0,02 Ом).
Зная формулу расчета тока для полной цепи определимся с возможностью.
I = (Е-Ubat) / (R+r) = (16,6-12,3) / (0,531+0,02) = 7.8 A
Но в данном случае мы не учитываем нагрузку: допустим наша нагрузка ПУШ-ПУЛ драйвер разгонного модуля имеет потребление 6А * 12,3В = 73,8 Вт.
Рассчитаем сопротивление нагрузки Rz=U/I = 12,3/6 = 2,5 Ом
Нам остается только добавить данное сопротивление в формулу:
I = (Е-Ubat) / (R+Rz+r) = (16,6-12,3) / (0,531+2,5+0,02) = 1,4 A
Как видим нам не хватает результирующей ЭДС
(е=Е-Ubat) е = 16,6В - 12,3В = 4,3В .
Чтобы условие выполнить нам нужна ЭДС фазы в значении Е = 36 В
(е=Е-Ubat) е = 36В - 12,3В = 23,7В
I = (Е-Ubat) / (R+Rz+r) = (36-12,3) / (0,531+2,5+0,02) = 7,8 A
Теперь проверим электромагнитный момент на валу:
Мощность нашей фазы (W=) 7,8А * 12,3 В = 95,9 Вт.
Скорость вращения допустим (n=) 500 об/мин
Считаем:
М = 9550* W/ n 9550 * 0.096 кВт / 500 об/мин = 1,8 Н*м
Зная момент силы маховика ротора равный 57 Н*м можем определить соотношение момента генератора к моменту инерционного ротора
1,8 / 57 = 0,0315 т.е. всего 3% от момента ротора.
Так что делайте выводы, и главное все считайте. Расчет это аксиома верного инженерного решения. А автору нужен соответствующий генератор.
Продолжение от автора, показ мощности потребления ПУШ-ПУЛЛ драйвера.
Что демонстрирует автор? Потребление Драйвера ПУШ-ПУЛЛ от сетевого источника постоянного тока с Амперметром и Вольтметром
Можем рассчитать сопротивление драйвера с катушками. Для справки: стрелочный аналоговый амперметр показывает среднее значение тока при импульсном его значении. Из этого следует, что пиковое значение будет 2I от того что мы видим по показаниям. У нас выходит 5 В и 0,4 А . Определим сопротивление всего драйвера
R = U/I = 5/0,4 = 12,5 Ом.
Можем определить пиковое потребление при напряжении питания от АКБ 12,3 В
I = U/R = 12.3/12.5 = 0.98 A ( Среднее = 0.492 A)
Определяем мощность потребления ПУШ-ПУЛЛ драйвером в прошлых демонстрациях от АКБ 12,3 В
Р= UI = 12.3 В * 0,492 А = 6,0 Вт.
И эта мощность крутит такой себе лёгкий ротор.
ПРОДОЛЖЕНИЕ:
Автор уменьшил сечение ярма статорного железа, уменьшил сечение провода намотки с с диаметра 0,5 мм на 0,35 мм. Главное увеличил количество витков одной катушки до 100 витков.
16 катушек по 100 витков провода диаметром 0,35 мм.
Приблизительно сечение сердечника 30 х 10 мм, длина витка 80 мм * 100 = 8000 мм (8 метров).
8 метров * 16 катушек = 128 метров общая длина фазы
Определим сопротивление и возможности по току.
Сопротивление фазы 128 метров * 0,177 Ом = 22,66 Ом. Максимально возможный пропускной ток жилы 0,99 Ампер.
I = E-U / R+r = (32V - 12.3V) / (22.66 Ом +12.5 Ом + 0,02 Ом) = 0,56 А
Средний ток будет в половину меньше 0,56 А * 0,5 = 0,28 А
То есть средняя мощность фазы для заряда АКБ и драйвера Р/Р с напряжением 12,3 В составит:
W = UI = 12,3В * 0,28А = 3,4 Вт
Мощность потребления ПУШ-ПУЛА на холостом ходу:
Р= UI = 12.3 В * 0,492 А = 6,0 Вт.
Вывод: Автор очень близко подошел к равновесию и системы и возможности самохода.
К сожалению автор не довел свою установку до логического конца, "споткнувшись" именно на генераторе. Первое его ошибка при изменении параметров генератора, что он не менял ротор оставив магнитную индукцию на том же месте, а удлинил провод уменьшил его сечение. В итоге он получил необходимую ЭДС (вольтаж холостого хода) но исключил возможность получения нужного параметра тока в жиле. А нужно было или увеличить магниты изменив конструкцию ротора или добавить еще один узел разгонного модуля по технологии ПУШ-ПУЛ дабы увеличить скорость вращения массы маховика.
Формула ЭДС: Е = B*L*V ; где: B магнитная индукция (в Теслах); L - длина проводника (в метрах); V - скорость изменения магнитной индукции на проводнике ( метры в секунду). Формула тока: I = (E - Ubat)/R+rZ+r0; где: Е - эдс фазы без нагрузки (в вольтах): Ubat - рабочее напряжение АКБ (в вольтах); R,rZ,r0 - сопротивления контура, нагрузки и жилы фазы ( в Омах)
Вторая формула не меняется по ней рассчитываем ток, т.е. напряжение АКБ и сопротивления менять нельзя, остается только один параметр ЭДС.Чтобы выполнить условие параметр длины проводника в его случае менять было нельзя. или же выполнить большим сечением для сохранения параметра сопротивления жилы фазы r0 (в Омах) Остается только два параметра В - магнитная индукция ( в Теслах) увеличить , это значит добавить магнитов в стопке, или V - скорость изменения магнитной индукции на проводнике ( метры в секунду) методом добавления еще одного или нескольких разгонных узлов системы ПУШ-ПУЛ. Возможно в будущем, автор все же добьется правильного расчета своей конструкции и получит самоход с подзарядом батареи балласта.
****
Я разработал другой тип ПУШ-ПУЛ для разгонного модуля. Проблема модуля который применялся в эксперименте слабое магнитное поле. Показатель магнитного поля складывается из Ампер витков: I (A)*N(w) Таким образом в предложенной авторской схеме отбор от источника небольшой, что сказывается на электромагнитной силе взаимодействия узла ротор-статор. Второй фактор это скорость (частота) переключения.
В данной схеме мы добавляем шунтирующую цепочку с балластным конденсатором. Так же предлагаю использовать составной транзистор на соответствующий ток. Симуляция показывает что при малых напряжениях 4-5В, при индуктивности обмотки 1 млГн можно получить ток в 1 А
На один маховик-ротор с магнитами, необходимо минимум два таких модуля, эффективнее три. Работа каждого должна быть со сдвигом, таким образом чтобы в любой момент времени присутствовала максимальная электромагнитная сила +F, которая является создающей ускорение для вращения. Она совпадает с вектором скорости вращенияv, таким образом крутящий момент мотора Тm является положительным статическим (+Т). К данному крутящему моменту прибавляется еще крутящий момент от инерции массы махового колеса Тi, который является динамическим моментом. Динамический момент имеет особенность убывать при взаимодействии с отрицательным крутящим электромагнитным моментом -Т(Load) нагрузки и трения системы -Т(mechanical). Динамический момент маховика применяется в кинетических системах, где присутствует переменный характер отрицательного момента Таким образом современные генераторы где электромагнитный момент планируется сделать ровным не годятся для данной системы. Генератор должен быть с переменным моментом на валу. К таким генераторам относятся вентильные-реактивные машины. Также могут быть управляемые включением в работу генератора в определенные отрезки времени.
Общий вид системы следующий:
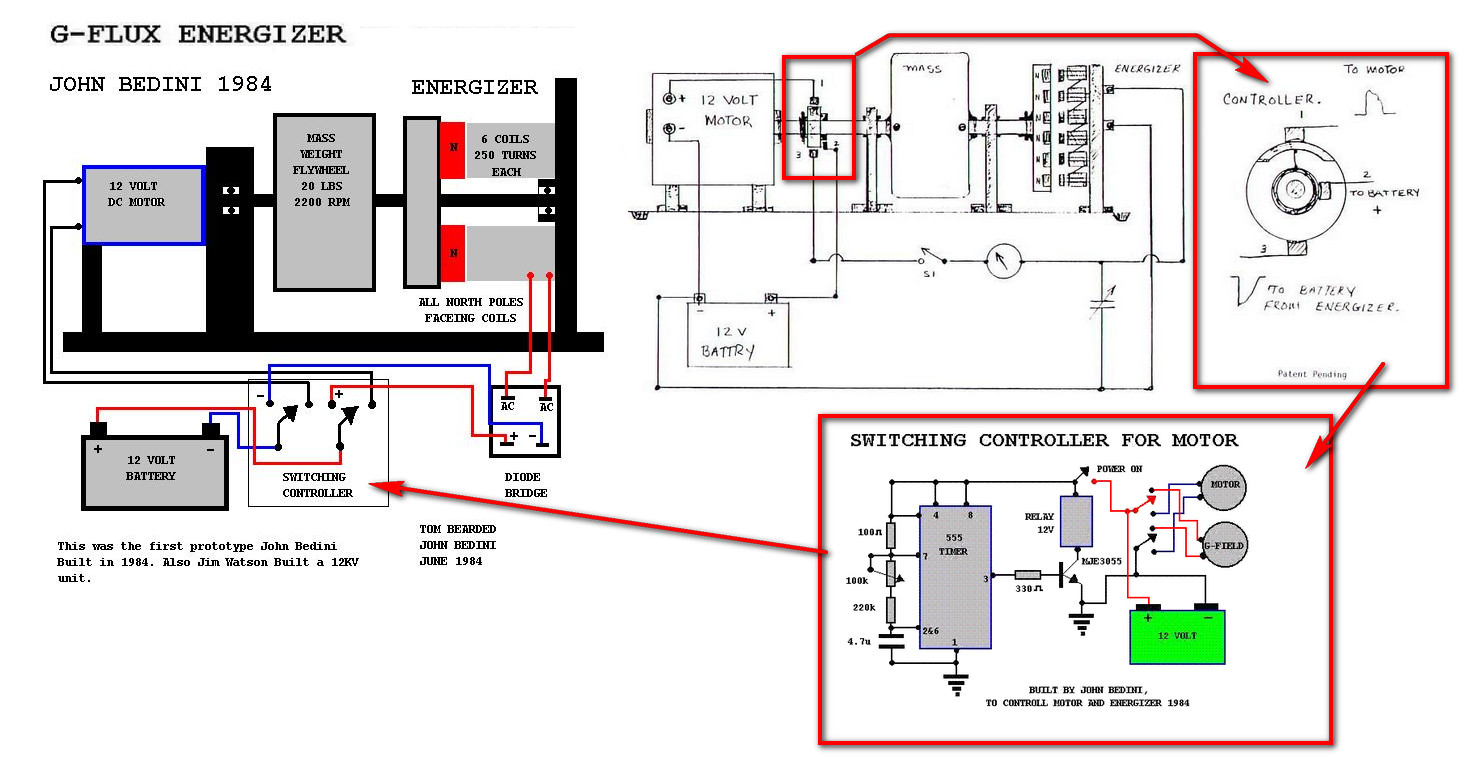
Импульсный генератор не будет работать напрямую для потребителя, ему нужна система управления, выпрямления и балластного источника напряжения с соответствующей емкостью. Эффективнее рассчитать работу генератора в период от одного показателя, общего максимального момента маховик-мотор, до значения минимального возможного момента маховик-мотор. При включении генератора момент маховика будет уменьшаться измерить возможно по скорости вращения. Таким образом работал генератор Джона Бедини Энерджайзер
К К современным устройствам относится ЗЕМНОЙ ДВИГАТЕЛЬ. Если прочитать что говорят о своей конструкции авторы ЗЕМНОГО ДВИГАТЕЛЯ (Гравитационного генератора) из США
Мы “толкаем” большую массу, управляя магнитным полем. Когда два противоположных источника "топлива" (магнитные поля), приводящие в движение массу маховика, находятся в правильном положении, двигатель запускает небольшой электромагнитный заряд, мощностью около 52 Ватт. Этот заряд позволяет противоположным источникам топлива “видеть” друг друга и может создавать значительную силу для вращения большой массы маховика. Эта сила инерции вращающейся массы, затем передается через отдельную магнитную связь генератору, который производит электрическую энергию. Эта сила также может быть использована механически. (Источник: https://ie.energy/about.html)
A small analysis of external factors and past videos: We have an EMF dimension (E=) of 16.6 V and a phase resistance (R=) of 0.531 Ohms Next, we have the battery voltage (Ubat =) 12.3 V, the battery resistance is assumed to be (r=) 0.02 ohms. Knowing the formula for calculating the current for a complete circuit, we will determine the possibility. I = ( E - U bat ) / (R+r) = (16,6-12,3) / (0,531+0,02) = 7.8 A But in this case, we do not take into account the load: let's say our load PUSH-POOL driver of the overclocking module has a consumption of 6A * 12.3 V = 73.8 W . Calculate the load resistance Rz=U/I = 12.3/6 = 2.5 ohms We can only add this resistance to the formula: I = ( E-Ubat) / (R+ Rz +r) = (16,6-12,3) / (0,531+ 2,5 +0,02) = 1,4 A As we can see, we lack the resulting EMF (E=). To fulfill the condition, we need the EMF of the phase in the value E = 36 V I = ( E-Ubat) / (R+ Rz +r) = (36-12,3) / (0,531+ 2,5 +0,02) = 7,8 A
The author reduced the cross-section of the stator iron yoke, reduced the cross-section of the winding wire from 0.5 mm to 0.35 mm in diameter. The main thing is to increase the number of turns of one coil to 100 turns. 16 coils of 100 turns of wire with a diameter of 0.35 mm. Approximate cross-section of the core is 30 x 10 mm, the length of the coil is 80 mm * 100 = 8000 mm (8 meters). 8 meters * 16 coils = 128 meters total phase length Determine the resistance and current capabilities. Phase resistance 128 meters * 0.177 Ohm = 22.66 Ohm. The maximum possible throughput current of the conductor is 0.99 Amperes. The maximum EMF of a phase is 32 volts. We can calculate the possible maximum pulse current. I = E-U / R + r = (32V - 12.3V) / (22.66 Ohm + 0.02 Ohm) = 0.87 A The average current will be half less than 0.87 A * 0.5 = 0.44 A That is, the average phase power for charging AKT with a voltage of 12.3 V will be: W = UI = 12.3V * 0.44A = 5.41W Power consumption of PUSH-PULA at idle speed: P = UI = 12.3 V * 0.492 A = 6.0 W.
Conclusion: The author came very close to the equilibrium of the system and the possibility of self-propelled.
























2 коментарі:
A small analysis of external factors and past videos: We have an EMF dimension (E=) of 16.6 V and a phase resistance (R=) of 0.531 Ohms
Next, we have the battery voltage (Ubat =) 12.3 V, the battery resistance is assumed to be (r=) 0.02 ohms.
Knowing the formula for calculating the current for a complete circuit, we will determine the possibility.
I = ( E - U bat ) / (R+r) = (16,6-12,3) / (0,531+0,02) = 7.8 A
But in this case, we do not take into account the load: let's say our load PUSH-POOL driver of the overclocking module has a consumption of 6A * 12.3 V = 73.8 W .
Calculate the load resistance Rz=U/I = 12.3/6 = 2.5 ohms
We can only add this resistance to the formula:
I = ( E-Ubat) / (R+ Rz +r) = (16,6-12,3) / (0,531+ 2,5 +0,02) = 1,4 A
As we can see, we lack the resulting EMF (E=). To fulfill the condition, we need the EMF of the phase in the value E = 36 V
I = ( E-Ubat) / (R+ Rz +r) = (36-12,3) / (0,531+ 2,5 +0,02) = 7,8 A
The author reduced the cross-section of the stator iron yoke, reduced the cross-section of the winding wire from 0.5 mm to 0.35 mm in diameter. The main thing is to increase the number of turns of one coil to 100 turns.
16 coils of 100 turns of wire with a diameter of 0.35 mm.
Approximate cross-section of the core is 30 x 10 mm, the length of the coil is 80 mm * 100 = 8000 mm (8 meters).
8 meters * 16 coils = 128 meters total phase length
Determine the resistance and current capabilities.
Phase resistance 128 meters * 0.177 Ohm = 22.66 Ohm. The maximum possible throughput current of the conductor is 0.99 Amperes.
The maximum EMF of a phase is 32 volts. We can calculate the possible maximum pulse current.
I = E-U / R + r = (32V - 12.3V) / (22.66 Ohm + 0.02 Ohm) = 0.87 A
The average current will be half less than 0.87 A * 0.5 = 0.44 A
That is, the average phase power for charging AKT with a voltage of 12.3 V will be:
W = UI = 12.3V * 0.44A = 5.41W
Power consumption of PUSH-PULA at idle speed:
P = UI = 12.3 V * 0.492 A = 6.0 W.
Conclusion: The author came very close to the equilibrium of the system and the possibility of self-propelled.
Дописати коментар